2024年3月13日下午,由学院、上海自主智能无人系统科学中心联合举办的智·信讲堂第64期在bwin必赢智信馆117报告厅开讲。本次讲堂邀请英国林肯大学Timothy Gordon教授作“Post-Impact Stability Control-automated driving beyond the normal limits of vehicle control”主题报告,由陈虹教授主持。
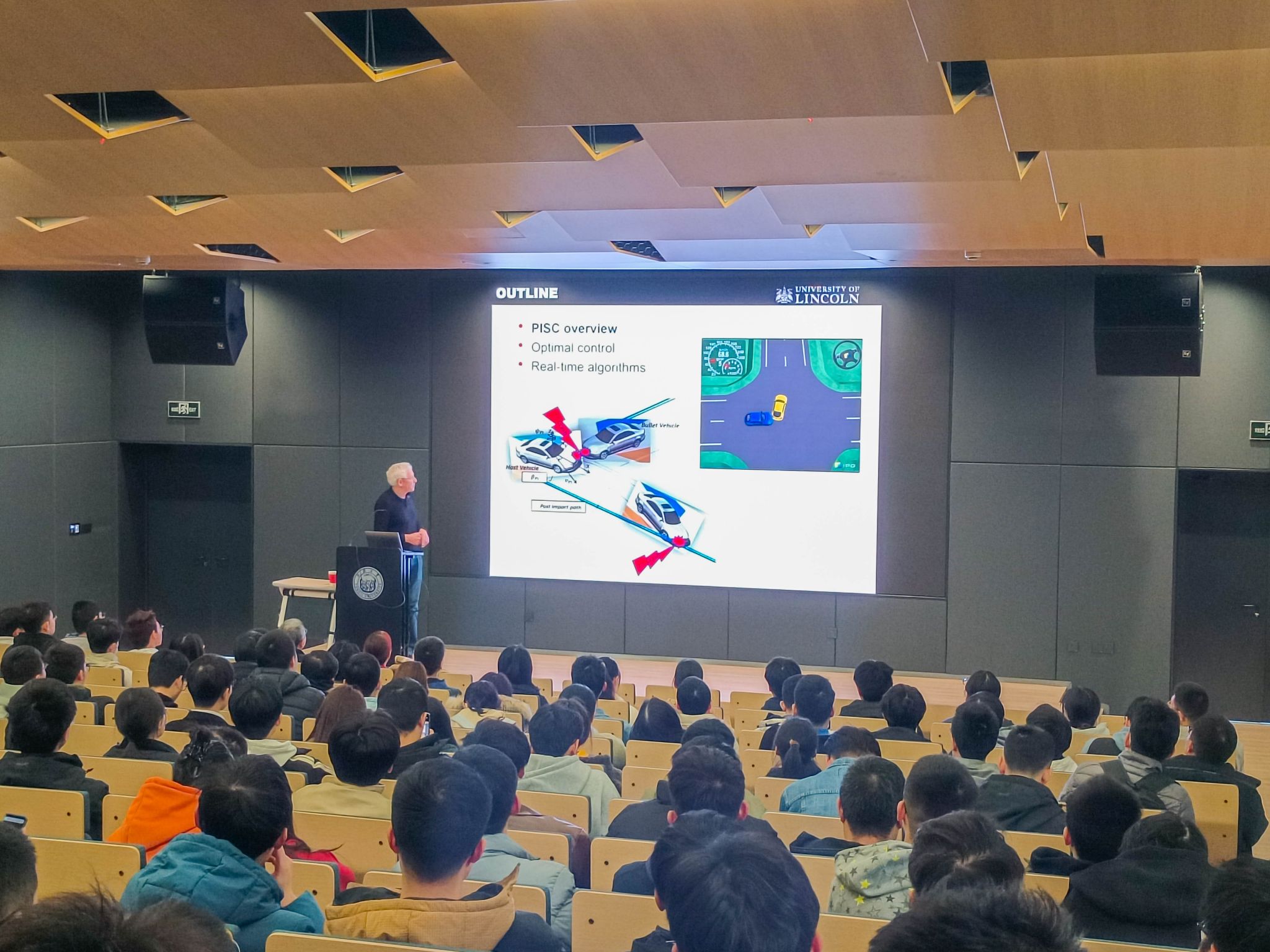
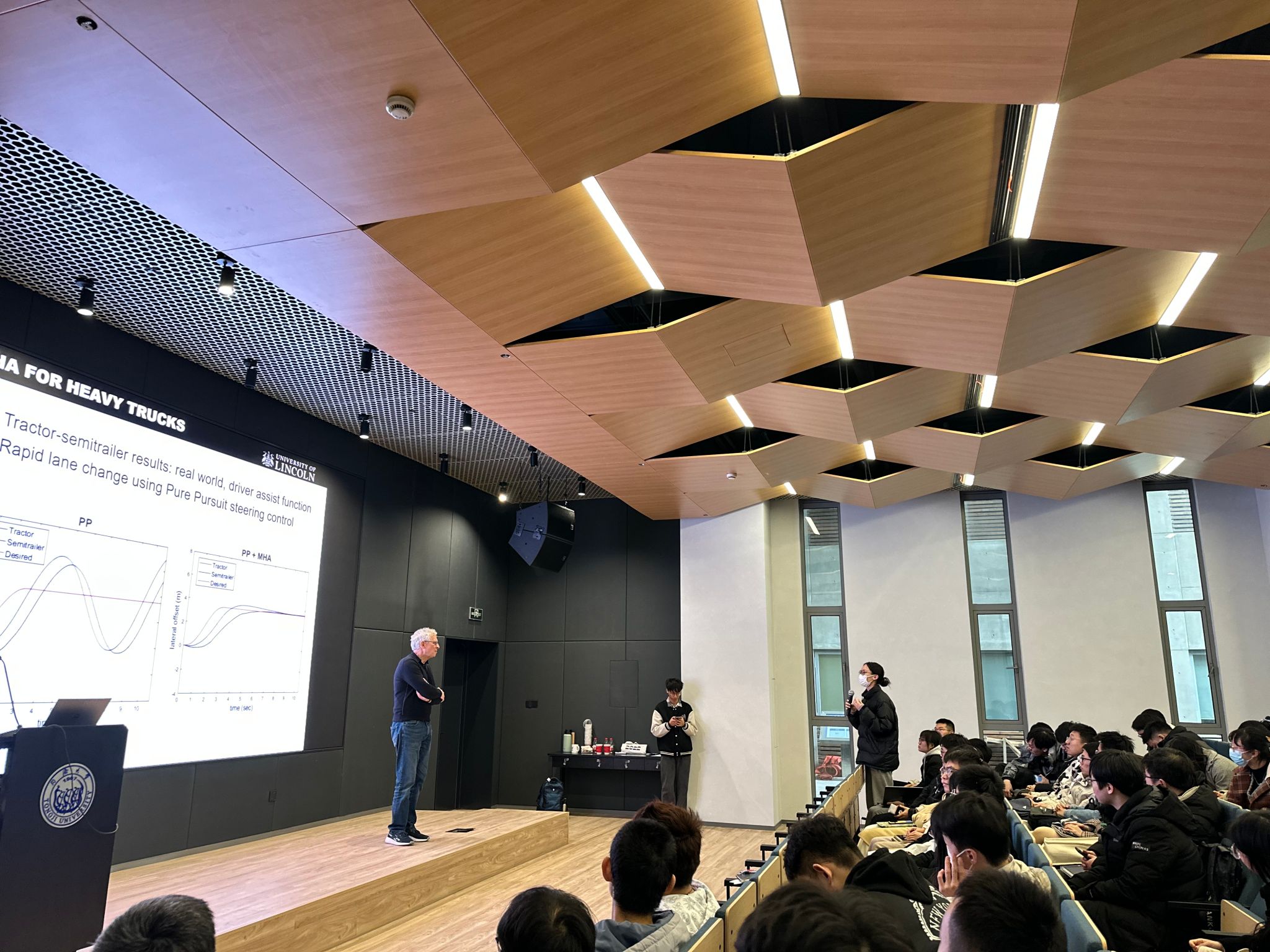
首先,Timothy Gordon教授对碰撞后稳定控制(PISC)进行了介绍,分析了车辆事故的危害、真实世界中碰撞事件及仿真软件中正面碰撞案例,并比较了有无PISC函数情况下稳定性控制效果。然后,他详细地介绍了PISC的三个阶段,包括PISC自动控制、稳定路径控制以及软切换到自动驾驶。接着,Timothy Gordon教授将碰撞后稳定控制问题建模为优化问题并使用庞氏极小值原理去解决,介绍了准线性最优控制良好的逼近了完全非线性最优控制。此外,Timothy Gordon教授还给出了碰撞后稳定性控制方案的结构以及前述优化问题的四个性能指标。最后,Timothy Gordon教授通过仿真和实验测试了PISC和其他不同的控制方案的有效性。
报告结束后,Timothy Gordon教授就碰撞后稳定性控制及自动驾驶相关的问题与老师和同学们进行了交流。他也根据自身经历勉励同学们要积极拓宽视野,努力探索、发现并解决新的科学问题。此次报告进一步拓展了我校师生的视野,增强了对碰撞后稳定性控制的理解与认识。(文/张皓 图/任倩 尹章云)
